pendsim: A Pendulum-on-a-cart Simulator!#
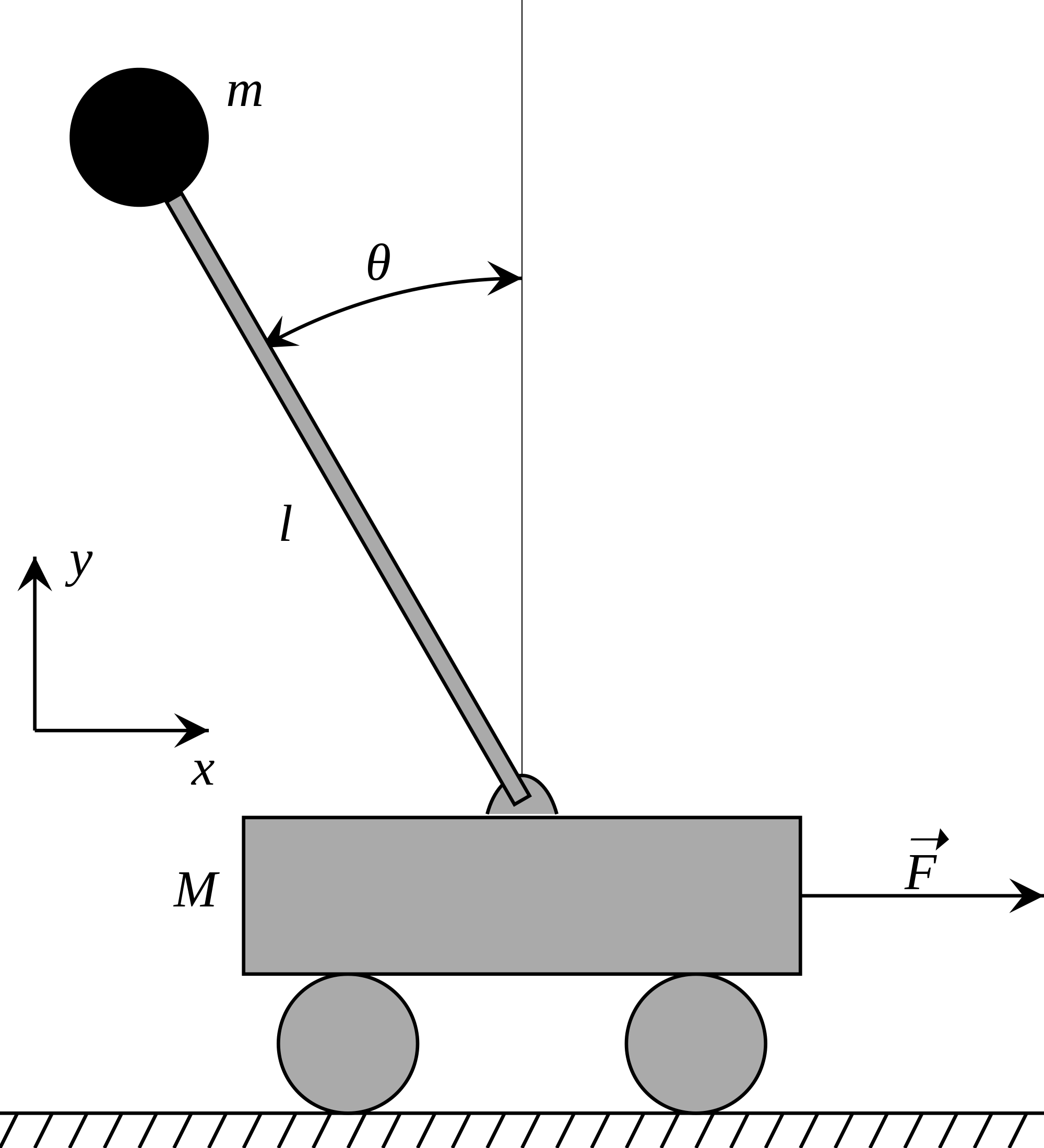
pendsim is a package for exploring dynamics, control, and state estimation techniques, in the context of every control theorist’s favorite system: the inverted pendulum-on-a-cart problem!
Note
For a summary of the package features, as well as how it can be used in an educational context, see the pending Journal of Open Source Education (JOSE) submission.
It can serve as a companion to any control theory textbook that includes the classic pendulum problem, or as a utility for creating virtual labs, visualizations, programming assignments, and more! Or, you can use it for exploring or validating experimental techniques.
Citing#
To cite pendsim please use the following publication:
Mike L. Sutherland and David A. Copp, “pendsim: an inverted-pendulum-on-a-cart simulator written in Python”, Irvine, CA, USA, Jul 2020.
Audience#
I wrote pendsim to explore concepts relating to dynamical systems, control theory, state estimation, and machine learning in a controls-related context. Therefore, pendsim is written primarily for the student or educator. But, if you use it for anything else, I would love to know!
Python#
Python is a powerful programming language that enables high productivity. It has a very developed package ecosystem, including sophisticated packages for scientific and technical computing. To make the most out of this package, you will want to know how to write basic programs in Python. Among the many guides to Python, we recommend the Python documentation or the UC Irvine ICS 31 Notes by Prof. Pattis.
License#
MIT License
Copyright (c) 2020 Mike Sutherland
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the “Software”), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.